【活用事例】WormBot
【活用事例】WormBot
タグ: スマート農業
- このトピックには0件の返信、1人の参加者があり、最後に
 Yoshiyuki-Onoにより2022-02-22 10:11に更新されました。
Yoshiyuki-Onoにより2022-02-22 10:11に更新されました。
- 投稿者投稿
- 2022-02-22 10:11 #12920
 Yoshiyuki-Ono参加者
Yoshiyuki-Ono参加者背景・概要
私たち、青葉電子ではAgricultureとSTEM教育を組み合わせたAgri*STEMというテーマを提唱しています。誰にでも取り組める家庭菜園という素材を通して地球環境や地域社会への関心とともに科学する心を育てたいと考えています。昨年は横浜市のIToP横浜プロジェクトとして公営団地での自動菜園ロボット「FarmBot」の実証実験を行いました。その際にはLTE -Mリーフを環境測定IoTシステムに活用しました。
今回のコンテストでは、菜園で使用する堆肥を作成する「WormBot」を出展します。家庭ゴミを用いてミミズを養殖し堆肥を生産するミミズコンポストの育成環境管理IoTの仕組みをLTE-MリーフとLeafonyを使って作成します。
ミミズコンポストとは
植物が育つためには養分が必要です。近代農業では主に化学肥料が用いられていますが、この化学肥料は環境汚染の要因になっているとの指摘があります。環境に優しいサステナブルな有機農業では、自然由来の堆肥(コンポスト)が使われます。有機性のゴミをミミズの餌として使い堆肥(コンポスト)を生産する仕組みがミミズコンポストです。
ミミズコンポストは、家庭でも比較的手軽に取り組むことができます。一般的な家庭であれば、段ボール箱ほどの大きさで日々排出される台所ゴミを処理することができます。ミミズには庭で見かけるミミズ(ふとミミズ)ではなく、もっと細身のしまミミズという種類のものを使いますが、釣具店で釣り餌として販売されています。
家庭菜園の肥料を作成するという実利面に加えて、家庭から出るゴミの量を削減できる、(かわいいと感じるかどうかは個人差がありますが)生き物を飼うという楽しみがあるなど、家族で取り組むにとても有意義なものだと考えます。菜園で取れた野菜、人が食べきれなかった野菜クズをミミズが肥料にかえ、それでまた野菜が育つ、という循環プロセスの中で、人と自然との繋がり・共生を感じることができます。
WormBotの構造
ミミズコンポストは生きています。常にミミズが快適に感じられるような環境を作ってあげる必要があります。ミミズの生育環境をモニタリングし、それを適切な状態に維持できるようにすることがWormBotの狙いです。Worm Botの構造を図1に示しました。


WormBotは4つの層に分かれています。
一番下は液肥だまりです。ここにミミズの尿が溜まります。ミミズの尿はコンポストティーと呼ばれ、良質の液肥として使用できます。
その上にはミミズの居住スペースが配置されます。居住スペースにはピートモス、土、コーヒーかす、新聞紙などを混合したものを敷き詰めます。
その上は食事スペースとなり、ミミズは居住スペースから食事スペースに移動し、野菜屑などを食べます。
食事スペースの上にLeafonyで構築した計測システムが配置されます。
ミミズは食事スペースで野菜クズを食べ、居住スペースに戻り糞をします。居住スペースのベッドは徐々に堆肥化していきます。十分に堆肥化したら新しいベッドに取り替えます。
養殖がうまく行うとミミズは繁殖し、半永久的に堆肥を作ることができます。
全体は不透明の容器に収めます。居住層、食事層、容器は100円ショップやホームセンターで購入できる食器洗いかごやコンテナボックスが使用できます。
機能とシステム構成
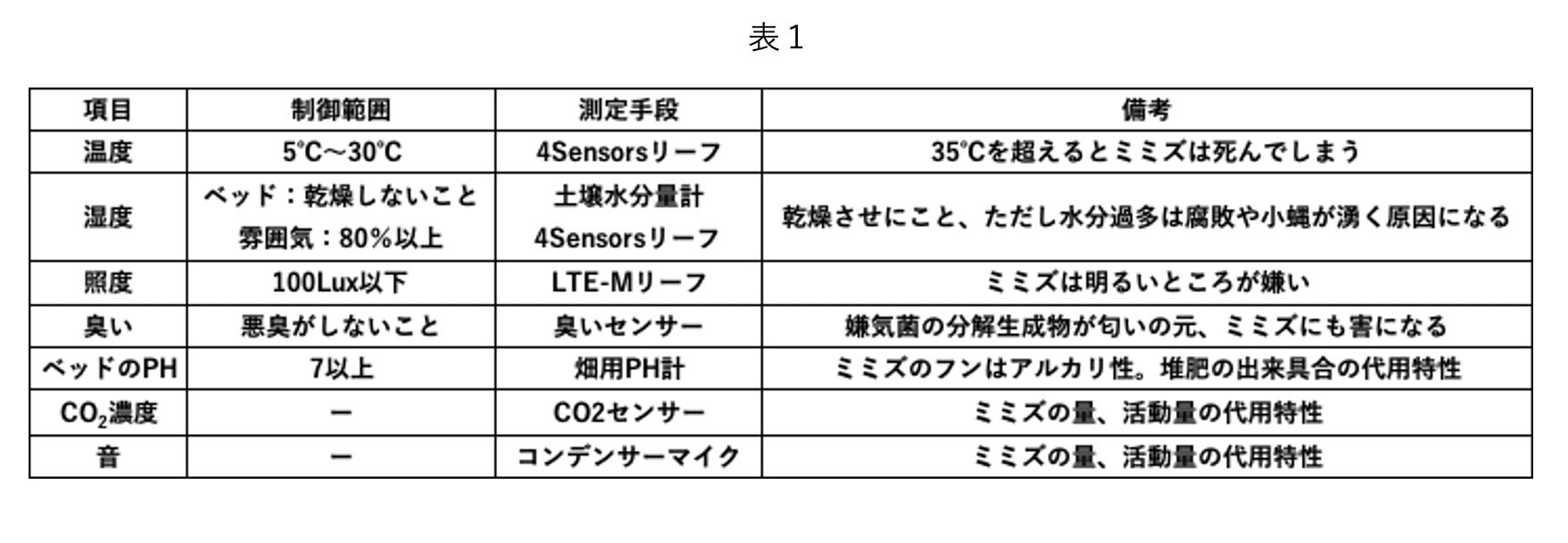
ミミズの育成環境で重要になるのは環境の温度、湿度、そしてベッドの水分量です。これらを測定する必要があります。また光を嫌いますので照度もモニタリングします。
ミミズコンポストがうまく機能しているときは、ゴミは腐敗せず悪臭はありません。臭いセンサー使ってモニタリングします。
ミミズの活動状況の目安としてCO2濃度を測定します。ミミズは皮膚呼吸します。ただし細菌によりゴミが発酵してもCO2が発生するので全てのCO2がミミズの呼吸由来だと決めることはできません。
ミミズは鳴きませんが餌(ゴミ)を食べるときに音を発生します。この音を高感度のコンデンサマイクにより録音します。うまく録音できればミミズの活動量の目安になります。
センシング項目は表1の通りです。
使用部品
- コントローラー
- LTE-Mリーフ MCU、LTE通信(SIM:SORACOM Air)
- Leafonyリーフ
- 4Sensorsリーフ 温湿度測定
- 29pinリーフ センサー接続
- LCDリーフ 測定結果、通信結果表示
- センサー
- MHZ19C CO2濃度測定
- TGS2450 臭い測定
- SKU:SEN0114 土壌水分量測定
- 電源
- モバイルバッテリー
- マイク
- Web会議用高感度USBマイク ミミズの活動音測定用
- 録音用コントローラ
- Raspberry Pi3 3G通信ドングル(ABIT)付き
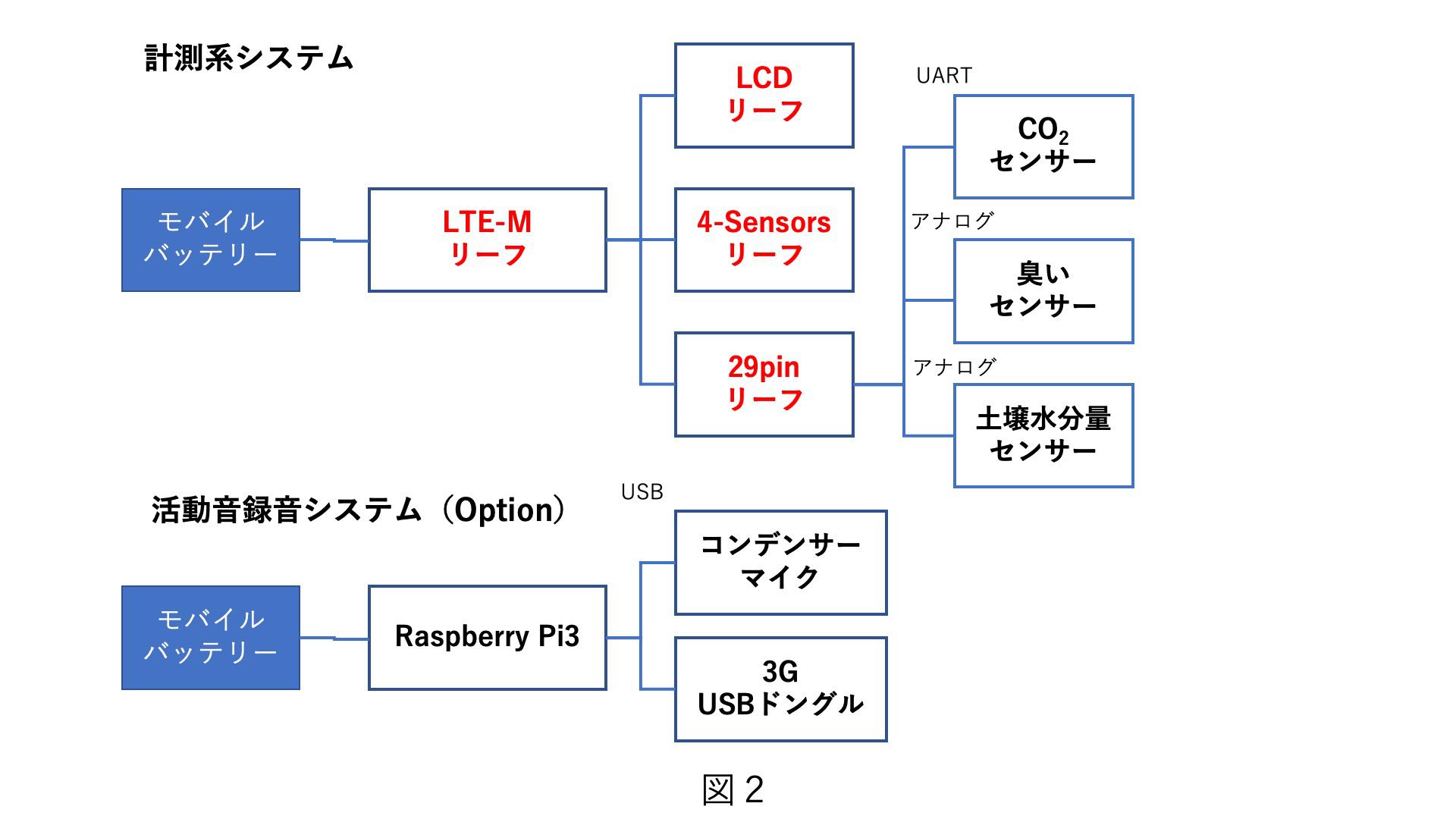
システム構成
システム構成は図2に示した通りです。
CO2センサーは29pinリーフを介してUARTで接続、土壌水分量センサーと臭いセンサーは同じく29pinリーフを介してアナログ入力で接続しています。
ミミズの活動音の録音は、当初MIC&VRリーフの利用を検討していましたが、LTE-Mリーフのアナログ入力が2ポートしかないため、RAspberry Pi3に高感度のUSBマイクを接続する別システムで行うことにしました。
モバイルバッテリーで駆動しており屋外でも使えるようにしており、計測データ、録音データともにSORACOM Harvestに格納されます。
結果と考察
ミミズコンポストを設置して日が浅いため、計測データは多くはありませんが、計測された結果を図3、図4に示します。
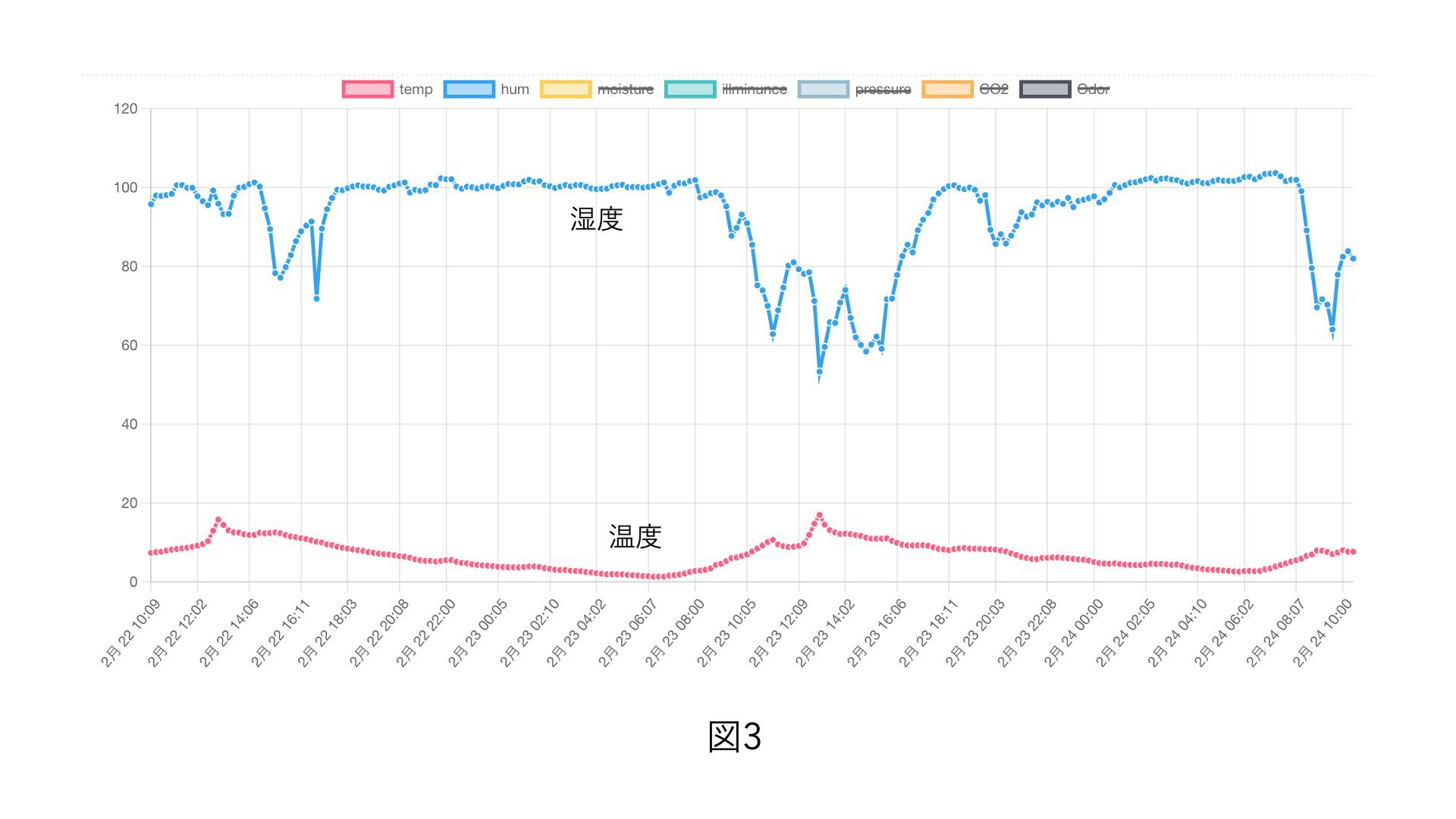

設置場所は直射日光が当たらない屋外、計測間隔は10分としています。
温度は1℃から20℃までの問題ない範囲で日内変動しています。環境湿度は気温変化に連動していますが暖かい日中で60%、気温が低い夜にはほぼ100%となっています。ベッドが十分に水分を含んでおり、室内は湿潤な環境になっています。ミミズは皮膚呼吸をしており乾燥が苦手ですが、これであれば問題ないでしょう。
図4にCO2濃度、臭いセンサー測定値、土壌水分量のデータをしましました。土壌水分量の読み値ですが、300以下は乾燥した土壌、300〜700が湿潤な土壌、700以上は水中に相当します。実際の測定値は600付近で安定しており、好ましい環境に維持できていると言えます。
大気のCO2濃度は約400ppm、人が快適に過ごせる室内の基準は1000ppm以下とされています。実際の計測値は400ppmから1300ppmまで日内で大きく変動しています。10時間ほどの間隔を置いてCO2濃度が高くなっているように見えます。ゴミの発酵によるものであれば、気温が高くなる日中に濃度が上がると思われますが、そうではありません。むしろ夜間にCO2濃度が上がっているようにも見えます。
臭いセンサーには、TGS2450を用いています。このセンサーはメルカプトンなどの硫化物系の化合物に最も敏感に反応しますが、アンモニア系ガス、アルコール系ガスにも反応します。正常な大気中では値は1000となり、臭い物質の濃度の量が増えると値は0に近づきます。実際の測定結果では600〜750の間でゆっくりと変動しています。臭い物質の増加(値が低くなる)するのは温度が上がる昼間に当たっているようなので、ゴミの発酵によるものなのかもしれません。
マイクでの録音データも収集していますが、今のところミミズがゴミを食べるときに発する音は録音できていません。
WormBotにミミズを投入してまだ3日ほどしか経過していません。ミミズが新しい環境になれるには少し時間がかかるとされています。与えたゴミにもまだ変化がありませんし、液肥も取れていません。もう暫く経過を観察する必要がありそうです。
今後の進め方
さらに観察を継続して、計測データと、ゴミの減り具合、ベッドのPH値、液肥(コンポストティー)の排出量、ミミズの繁殖量などとの相関を見える化し、ミミズコンポストの適正管理方法を確立していきたいと考えています。その中では、排出ガスの成分の同定(アルコール、アンモニア、硫化物系など個別ガスを定量するセンサーの導入)、ミミズの活動の赤外線カメラによる観察など必要に応じてシステムの拡張も検討します。
また多くの人にWormBotを使ってもらえるよう、ソースコードも含めてWormBotの作り方や運用方法の情報を整備し、オープンソースとして公開していく予定です。昨年実証実験で使用したFarmBotとともに、AgriSTEM教材としてキット提供することも考えていきたいと考えています。
最後に、WormBotの作り方を動画にまとめましたのでご覧ください。
- このトピックはYoshiyuki-Onoが2年、 2ヶ月前に変更しました。
- このトピックはYoshiyuki-Onoが2年、 2ヶ月前に変更しました。
- このトピックはYoshiyuki-Onoが2年、 2ヶ月前に変更しました。
- このトピックはYoshiyuki-Onoが2年、 2ヶ月前に変更しました。
- このトピックはYoshiyuki-Onoが2年、 2ヶ月前に変更しました。
- このトピックはYoshiyuki-Onoが2年、 2ヶ月前に変更しました。
- このトピックはYoshiyuki-Onoが2年、 2ヶ月前に変更しました。
- このトピックはYoshiyuki-Onoが2年、 2ヶ月前に変更しました。
- このトピックはYoshiyuki-Onoが2年、 2ヶ月前に変更しました。
- このトピックはYoshiyuki-Onoが2年、 2ヶ月前に変更しました。
- このトピックはTrillion-Node Staffが2年、 2ヶ月前に変更しました。
- このトピックはTrillion-Node Staffが2年、 1ヶ月前に変更しました。
- このトピックはTrillion-Node Staffが2年、 1ヶ月前に変更しました。
- このトピックはYoshiyuki-Onoが2年、 1ヶ月前に変更しました。
- コントローラー
- 投稿者投稿
- このトピックに返信するにはログインが必要です。
- トピックタグ
- スマート農業